山本ワールド
ロータリーエンジン

ロータリーエンジン H16.3.13
|
|
ステーショナリーギアとインナーギアーの回転している様子です。ステーショナリーギアは固定されています。ロータの位置決めをしています。
エキセントリックシャフトはロータと接している部分については偏心しています。この偏心によってロータの回転が伝わります。エキセントリックシャフトはステーショナリーギアの中を通過しています。ロータ3回転でエキセントリックシャフト1回転 |

ロータリーエンジンの動き(H16.3.9)
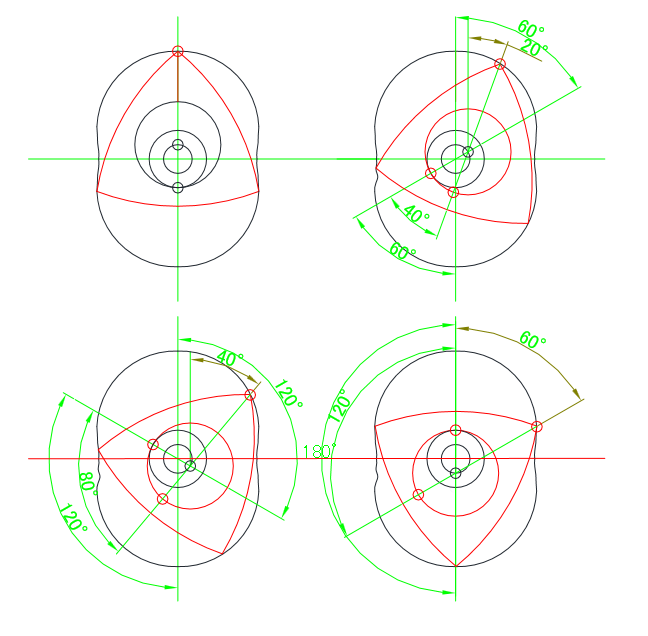
ロータ等の回転の様子です。動く前の点に○を、動いた後は○をつけました。ロータがロータの中心に対して20度(ロータの中心にたいして)しか回っていないのにエキセントリックシャフトが60度回っているのがわかると思います。また、ロータギアがステーショナリーギアに対して2/3の角度回ること、ロータギアの初期点が動くことがわかります。ロータがエキセントリックシャフトの周りを公転しながら(出力軸の中心から見てステーショナリギアと接している角度の移動量は同じ)自転(ロータの中心からみて公転の1/3ロータが傾く)
ロータリーハウジングの作図方法(H16.3.13)
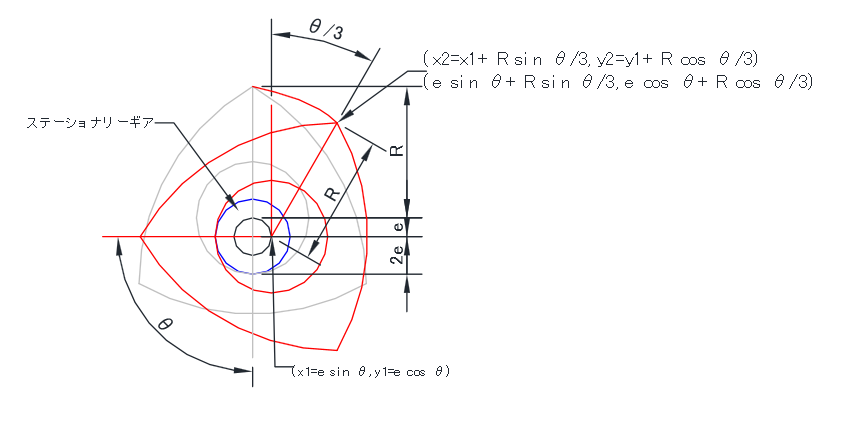
垂直線からステーショナリーギアとインナーギア(ロータの内側の歯)の接点との角度をθとし、ステーショナリーギアの中心の座標を(0,0)とすると
ロータの中心の座標 x1,y1は R sin θ , R cos θ ロータの天辺の座標 x2,y2は X1+R sin θ,y1+R cos θとなります。
13Bの場合、e=15㎜,ロータリーハウジングの長軸が240㎜、短軸が180㎜なので、R=240/2-15=105㎜となります。ちなみにRX-8の場合、ステーショナリーギアは34歯、ロータギアは51歯です。ロータ幅は80mmです。
θを0度から360度*3まで変化させるとロータリーハウジングが完成します。
一般的に1ロータの排気量といえば、ロータの1辺が、1回転で排出する量で表し13Bの場合、654ccとなっています。
Windows上で動作するフリーソフトの「N88互換BASIC Windows」で動作するBASICのソースプログラム r2.bas 実行結果 図-2
図-2
ロータの作図方法(H16.3.6)図-3
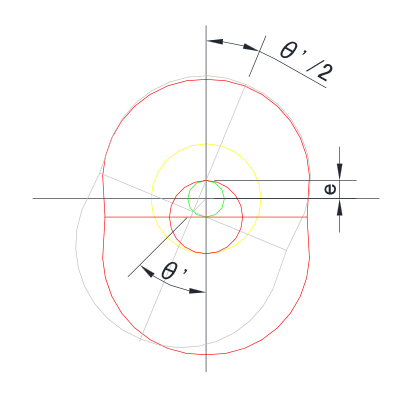
ロータを固定してステーショナリギアをロータの内側の歯車に沿って回すと(ハウジングはステーショナリギアに固定)ハウジングによってロータが描けます。ハウジングを作図するときに、作図する座標をθ'傾け、原点を (e sin θ',e cosθ')ずらせばokです。
座標をθ'傾けるには、ずらす中心を(0,0)とずらしたい点の座標を(x,y)とおけば、ずらした後の座標は(x cos θ' -y sin θ',x sin θ' + y cosθ')となります。
後々の計算を楽に x軸とy軸を入れ替えます。結局ロータの形状は (x,y)=
であらわせます。
x=
を簡略化すると
展開
eとrでまとめる
加算公式でまとめる
和差公式でまとめる![\displaystyle 2e \cos( \frac{\theta'}{2}+\frac{\theta'}{4}-\frac{\theta}{2}) \cos(\frac{\theta'}{2}-\frac{\theta'}{4}+\frac{\theta}{2})+r \cos(\theta/3-\theta'/2)]()
整理すると
![\displaystyle 2e \cos(\frac{3}{4}*\theta'-\theta*\frac{3}{6})\cos(\frac{1}{4}*\theta'+\frac{\theta}{2})+r \cos(\frac{\theta}{3}-\frac{\theta'}{2})]()
y=を簡略化すると
展開
eとrでまとめる
加算公式
和差公式
まとめる y=2e*sin*(1/4*θ'/2+θ/2)*cos(θ*3'/4-θ/2)+r*sin(-(θ'/2-θ/3))![\displaystyle y=2e \sin(\frac{1}{4}*\frac{\theta'}{2}+\frac{\theta}{2}) \cos(\theta'*\frac{3}{4}-\frac{\theta}{2})+r \sin(-(\frac{\theta'}{2}-\frac{\theta}{3}))]()
sinとcosの中に式が入ってややこしいのでこれをそれぞれ a bに置きます。
上記のx,yがロータリーの基本形の式です。
ちなみにステーショナリギアとロータギアの比を3:4にすると四角形のロータが 4:5にすると五角形のロータが作図できます。
ロータの原理を作図するプログラム r3.bas 実行結果 図-3
H16.3.21
ロータリーエンジンの振動特性(H15.5.28)
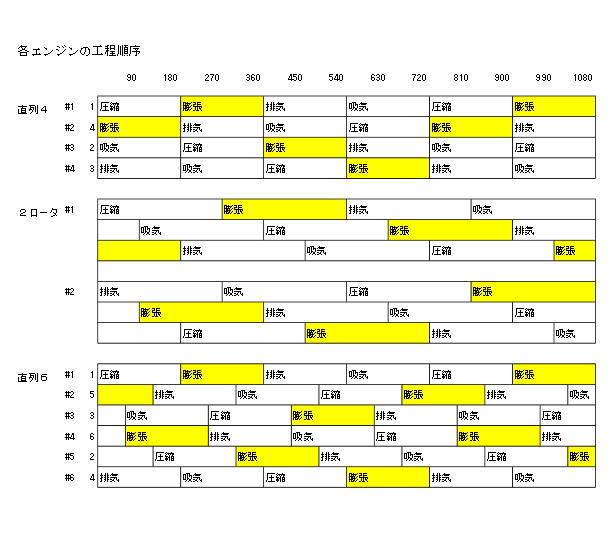
2ロータエンジンは、点火の回数は4気筒エンジンと同じですが、各工程の時間が長いため膨張行程が3個重複しています。よって6気筒エンジンに近い特性になります。ロータリーエンジンはただ単にロータより出力軸の回転数が多いからスムーズというわけではない。それなら変速機で回転数をあげればよいからだ。膨張行程がラップしていること、往復運動をしないことが原因である。