山本ワールド
乗算16bit*8bit=24bit アセンブラプログラム

概要
PIC18には8bit*8bit=16bitのハードウェア乗算器を搭載しており加算などと同じ1命令サイクル(4クロック)で実行できます。
AD変換値など8bitに収まらないデータを扱うために16bit*8bit=24bitの乗算プログラムを作成しました。
筆算と同じ方法で16bitの上位と下位をそれぞれ256進数とみなして下位*8bit*8bitと上位8bit*8bitをそれぞれ計算し後で桁をずらして加算します。
例えば32700*255の乗算を筆算で解いてみます。
32700は16進数で表すと0X7FBCです。
上位と下位をそれぞれ10進数で表すと127,188となります。
あとは筆算をするだけです。
データの並び順はリトルエンディアンです。
答えを表示するプログラムは記載していないのでエミュレーター上で実行してください。以下に実行例を示します。
使用メモリは以下のとおりです。
プログラムサイズ 55byte
アクセスバンク 6byte
乗算サブルーチンの実行速度はcallされてからreturnが終了するまで大雑把に14命令サイクルです。(64MHz 0.875μs)
8086のMUL命令の場合、16bit*16bitは118~133クロックです。(10MHz 13.3μs)
H8 3048のMULXU命令の場合、22クロック(16MHz 1.375μs)
AD変換値など8bitに収まらないデータを扱うために16bit*8bit=24bitの乗算プログラムを作成しました。
筆算と同じ方法で16bitの上位と下位をそれぞれ256進数とみなして下位*8bit*8bitと上位8bit*8bitをそれぞれ計算し後で桁をずらして加算します。
例えば32700*255の乗算を筆算で解いてみます。
32700は16進数で表すと0X7FBCです。
上位と下位をそれぞれ10進数で表すと127,188となります。
あとは筆算をするだけです。
127 188 (127*256+188=32700)
* 255
-----------
187 68 (187*256+68=47940)
126 129 (126*256+129=32385)*256
-----------
126 316 68 (126*256^2+316*256+68=8338500) 316は256以上なので繰り上げ処理
127 60 68 (127*256^2+ 60*256+68=8338500)
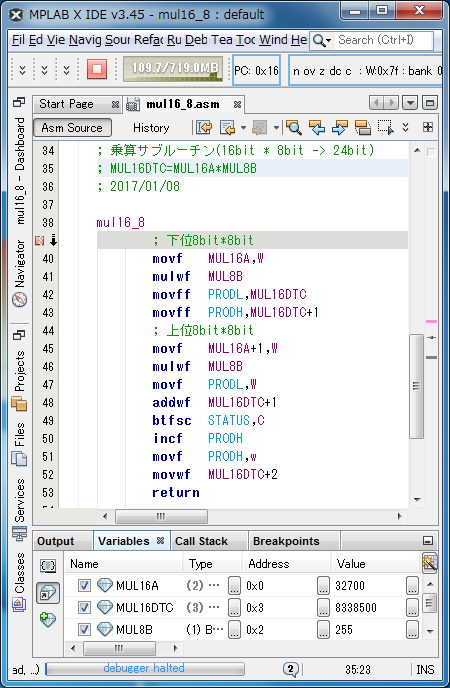
被乗数はMUL16A、乗数はMUL8Bに格納してからmul16_8をコールします。答えはMUL16DTCに格納されます。データの並び順はリトルエンディアンです。
答えを表示するプログラムは記載していないのでエミュレーター上で実行してください。以下に実行例を示します。
使用メモリは以下のとおりです。
プログラムサイズ 55byte
アクセスバンク 6byte
乗算サブルーチンの実行速度はcallされてからreturnが終了するまで大雑把に14命令サイクルです。(64MHz 0.875μs)
8086のMUL命令の場合、16bit*16bitは118~133クロックです。(10MHz 13.3μs)
H8 3048のMULXU命令の場合、22クロック(16MHz 1.375μs)